Professional 3-axis High-precise FOC Program
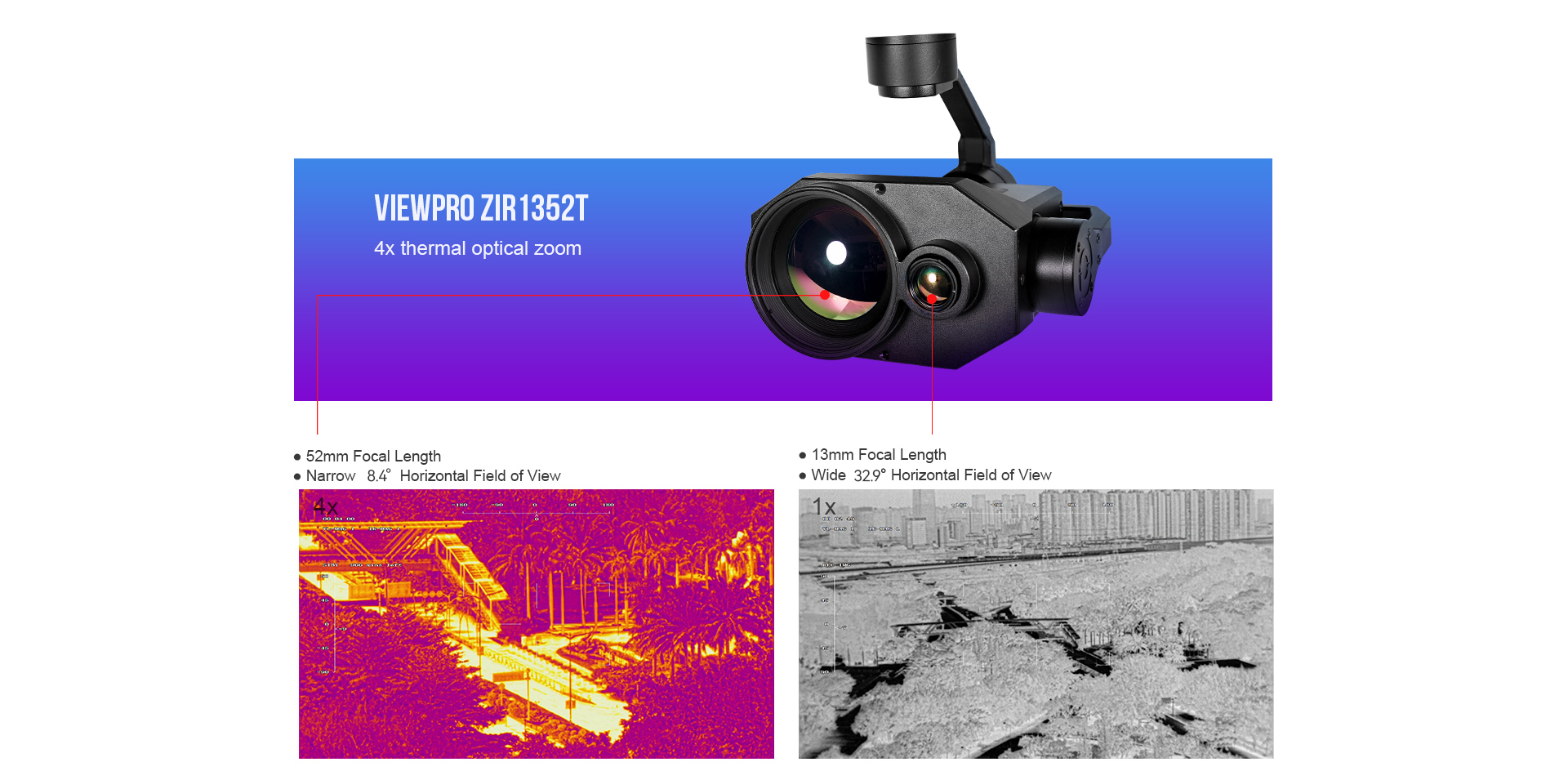
The ZIR1352T features thermal imager with 13mm & 52mm lens, supports 640*512 detector pixels, 4x optical zoom and 1x ~ 4x digital zoom. The gimbal can be controlled in three directions: YAW, ROLL and PITCH , we use FOC solution can greatly compensate the vibration of movement.
High Resolution Dual Thermal Zooming Camera
Integrated high-precision uncooled long wave (8μm ~14μm) thermal image sensor. With 4x optical zoom capabilities that IR sensor sitches from 13mm to 52mm, provides a wide 32.9° field of view for maximum situational awareness and a narrow 8.4° field of view to get the most thermal pixels on your target. The ZIR1352T allows operator from the public safety and industrial inspection sectors to gain field of FOV flexibility for improved image details and magnification to assess situations and make critical decisions.
Multi Output Methods Optional
ZIR1352T supports both HDMI output, Ethernet/IP output and SDI output. HDMI and output are 1080p, Ethernet output default as 720p and record is 1080p. IP output and SDI output versions will support 360 degree enless pan.


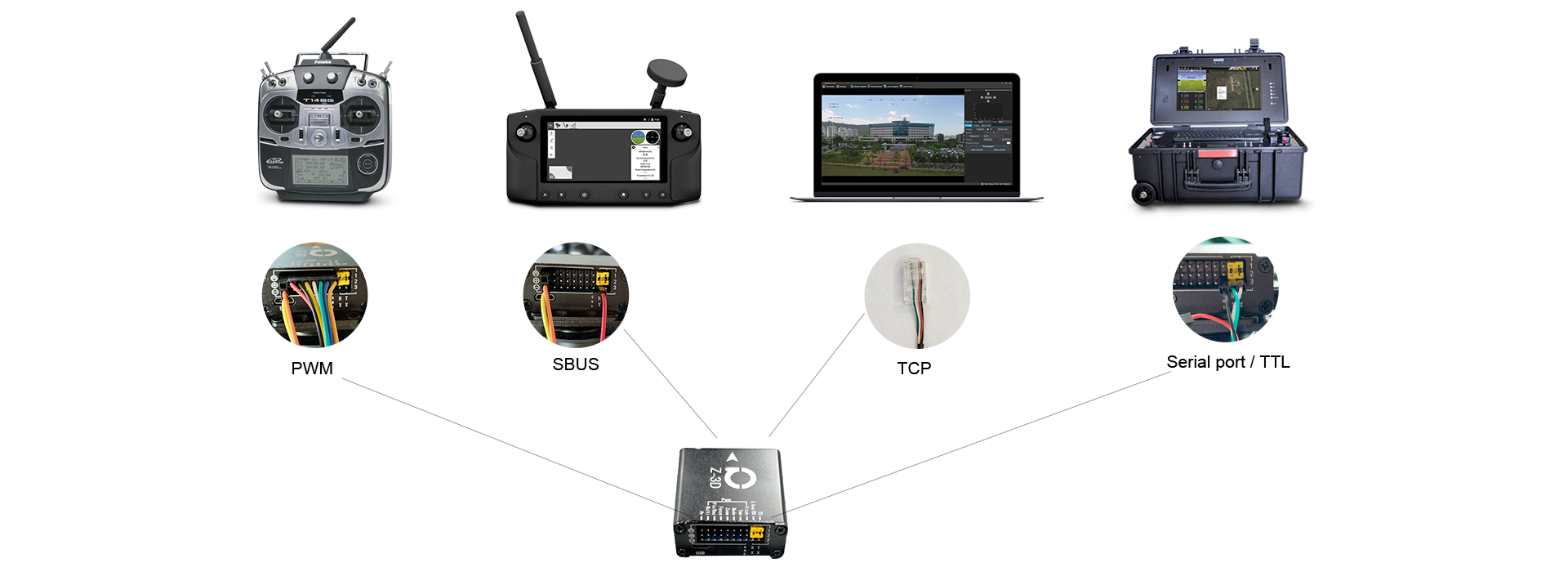
Multi Control Methods
Default PWM and Serial port TTL control, SBUS is optional, IP output version also support TCP control via ethernet cable. With Viewpro software Viewlink you can fulfill IP output, TTL control and TCP control.
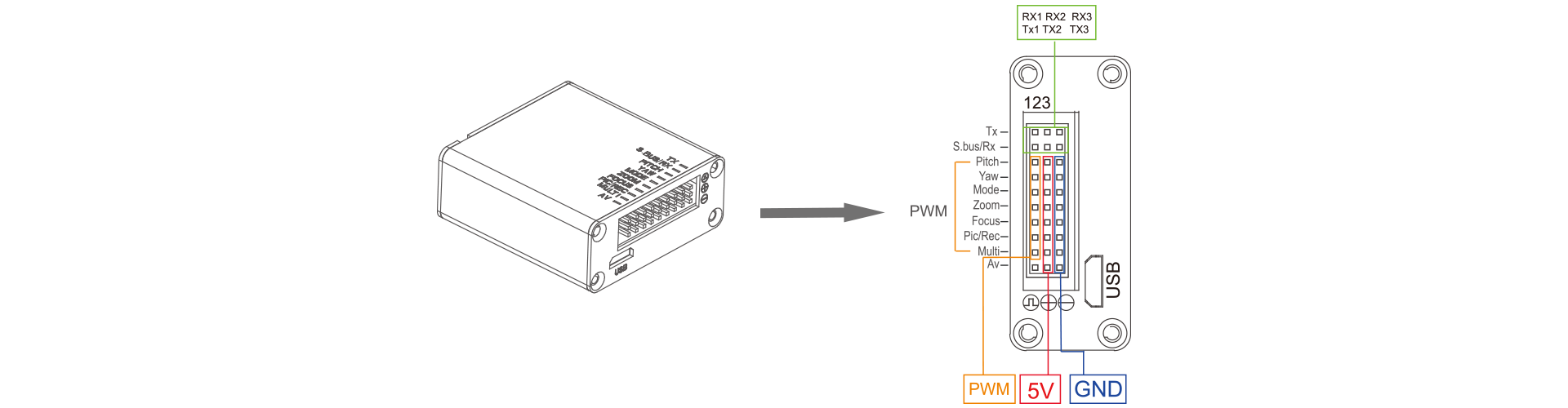
Control box signal interfaces:
Compatible with Viewport
ZIR1352T is compatible with Viewpro quick release connector Viewport. Viewport is an option known as easy assembly, plug and play.

Applications
"Our primary focus is on supplying equipment for various purposes such as firefighting, power tower maintenance, pipeline inspection, and search and rescue operations. Emergency situations demand a broad spectrum of monitoring and search capabilities to swiftly assess the situation and enhance response efficiency."

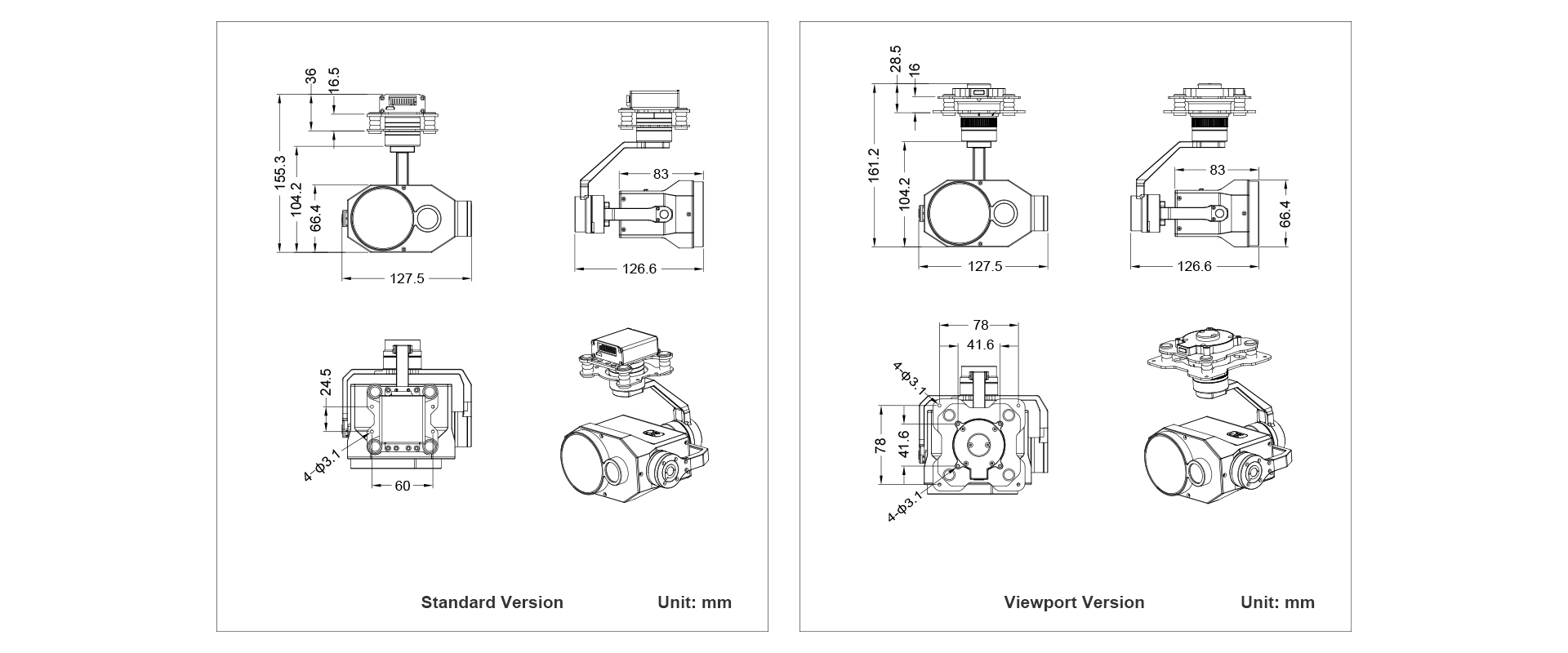
Dimensions
Specifications
| Overall Specifications |
| N.W. |
695g |
| Product meas. |
168.5*157.8*203.8mm |
| Input voltage |
14.8V~25.2V |
| Dynamic current |
500~1000mA @16V |
| Power consumption |
Average 8W, Max 16W |
| Working environment temp. |
-20℃ ~ +50℃ |
| IP rate |
IP4X |
| Output (optional) |
micro HDMI(1080P 60fps) / IP (RTSP/UDP 1080p/720p 25fps/30fps) |
| Storage |
TF card (Up to 512G,class 10, FAT32 format) |
| Picture in TF Card |
JPG(1920*1080) |
| Video in TF Card |
MP4(1080P@30fps) |
| Control method |
PWM / S.BUS / UART (TTL) / TCP / UDP |
| Gimbal Spec |
| Mechanical Range |
Pitch/Tilt: -70°(Up)~120°(Down), Roll: ±55°, Yaw/Pan: ±300°/±360°*N (IP output version) |
| Controllable Range |
Pitch/Tilt: -45°~115°, Yaw/Pan: ±290°/±360°*N (IP output version) |
| Vibration angle |
Pitch/Roll/Yaw: ±0.02° |
| One-key to center |
√ |
| IR Thermal Imager Spec(52mm) |
| Focus Length |
52mm |
| Horizontal FOV |
8.4° |
| Vertical FOV |
6.8° |
| Diagonal FOV |
10.8° |
| Detective Distance (Man: 1.8×0.5m) |
2167 meters |
| Recognize Distance (Man: 1.8×0.5m) |
542 meters |
| Identification Distance (Man: 1.8×0.5m) |
271 meters |
| Detective Distance (Car: 4.2×1.8m) |
6644 meters |
| Recognize Distance (Car: 4.2×1.8m) |
1661 meters |
| Identification Distance (Car: 4.2×1.8m) |
831 meters |
| Working mode |
Uncooled long wave (8μm~14μm) thermal imager |
| Detector pixel |
640*512 |
| Pixel pitch |
12μm |
| Focusing method |
Athermal prime lens |
| Emissivity correction |
0.01~1 |
| NETD |
≤50mK (@25℃) |
| MRTD |
≤650mK (@characteristic frequency) |
| Image enhancement |
Auto adjust image brightness and contrast ratio |
| Color palette |
white hot, black hot, pseudo color |
| Auto Non-uniform correction |
Yes (no shutter) |
| Digital zoom |
4x / 8x / 12x / 16x |
| IR Thermal Imager Spec(13mm) |
| Focus Length |
13mm |
| Horizontal FOV |
32.9° |
| Vertical FOV |
26.6° |
| Diagonal FOV |
41.4° |
| Detective Distance (Man: 1.8×0.5m) |
542 meters |
| Recognize Distance (Man: 1.8×0.5m) |
135 meters |
| Identification Distance (Man: 1.8×0.5m) |
68 meters |
| Detective Distance (Car: 4.2×1.8m) |
1661 meters |
| Recognize Distance (Car: 4.2×1.8m) |
415 meters |
| Identification Distance (Car: 4.2×1.8m) |
208 meters |
| Working mode |
Uncooled long wave (8μm~14μm) thermal imager |
| Detector pixel |
640*512 |
| Pixel pitch |
12μm |
| Focusing method |
Athermal prime lens |
| Emissivity correction |
0.01~1 |
| NETD |
≤50mK (@25℃) |
| MRTD |
≤650mK (@characteristic frequency) |
| Image enhancement |
Auto adjust image brightness and contrast ratio |
| Color palette |
white hot, black hot, pseudo color |
| Auto Non-uniform correction |
Yes (no shutter) |
| Digital zoom |
1x / 2x / 3x |
| EO / IR Camera Object Tracking |
| Update rate of deviation pixel |
50Hz |
| Output delay of deviation pixel |
5ms |
| Minimum object contrast |
5% |
| SNR |
4 |
| Minimum object size |
32*32 pixel |
| Maximum object size |
128*128 pixel |
| Tracking speed |
±48 pixel/frame |
| Object memory time |
100 frames (4s) |
| The mean square root values of pulse noise in the object position |
< 0.5 pixel |