| Hardware Parameter |
| Working voltage |
16V |
| Input voltage |
4S ~ 6S (14.8V~25.2V) |
| Output voltage |
5V (connect with PWM) |
| Dynamic current |
430~1250mA @16V |
| Power consumption |
Average 6.9W, Max 20W |
| Working environment temp. |
-20℃ ~ +50℃ |
| Output (optional) |
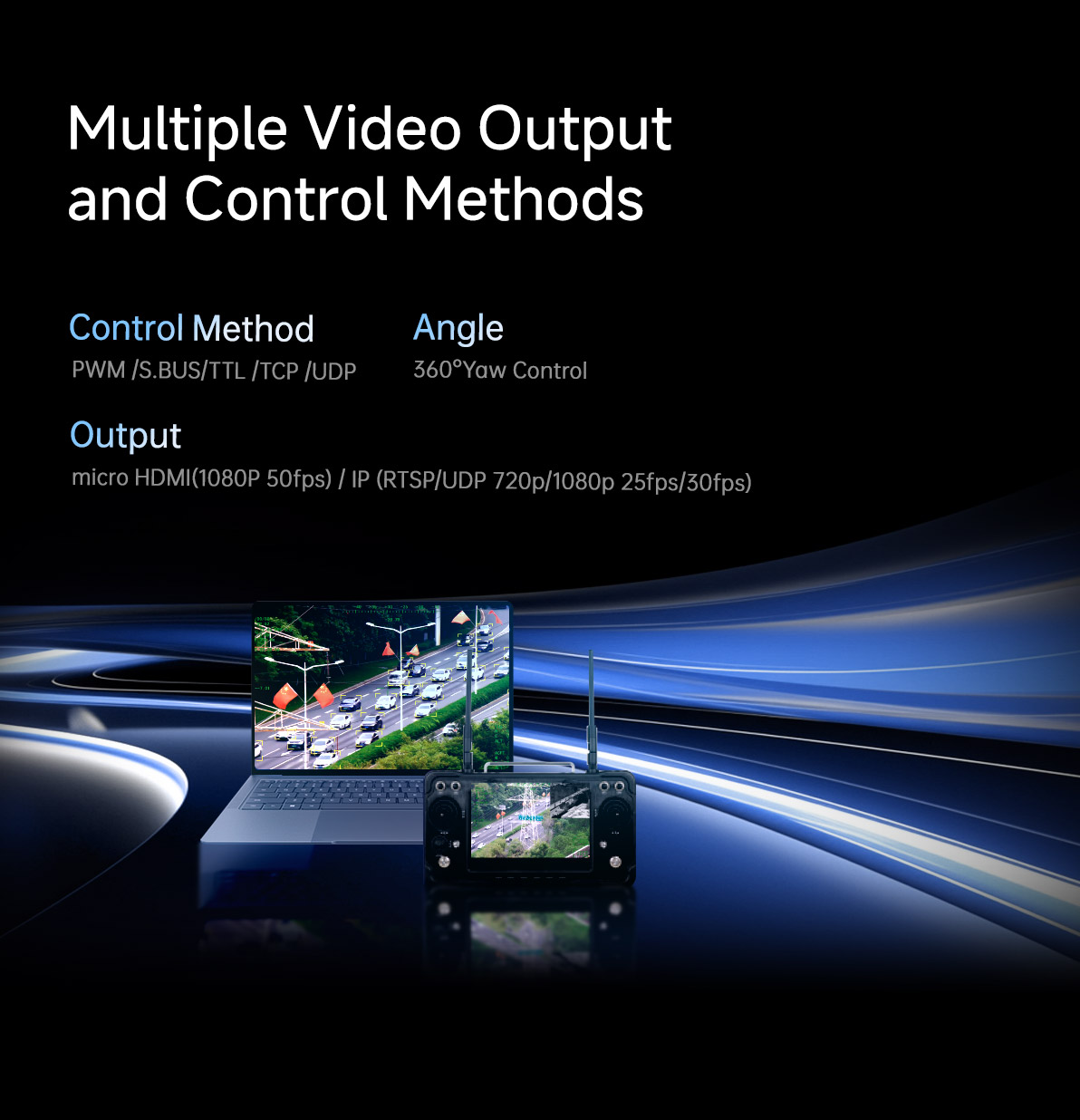
micro HDMI(1080P 50fps) / IP (RTSP/UDP 720p/1080p 25fps/30fps) |
| Local-storage |
TF card (Up to 512G,class 10, FAT32 format) |
| Picture storage format in TF card |
JPG(1920*1080) |
| Video storage format in TF card |
MP4(1080P 30fps) |
| Control method |
PWM / TTL / S.BUS / TCP / UDP |
| Gimbal Spec |
| Mechanical Range |
Pitch/Tilt: -55°(Up)~125°(Down), Roll: ±70°, Yaw/Pan: ±300° /±360°*N (IP output version) |
| Controllable Range |
Pitch/Tilt: -45°~120°, Yaw/Pan: ±290° /±360°*N (IP output version) |
| Vibration angle |
Pitch/Roll/Yaw: ±0.02° |
| One-key to center |
√ |
| IR Thermal Imager Spec(75mm) |
| Focus Length |
75mm |
| Horizontal FOV |
5.9° |
| Vertical FOV |
4.7° |
| Diagonal FOV |
7.5° |
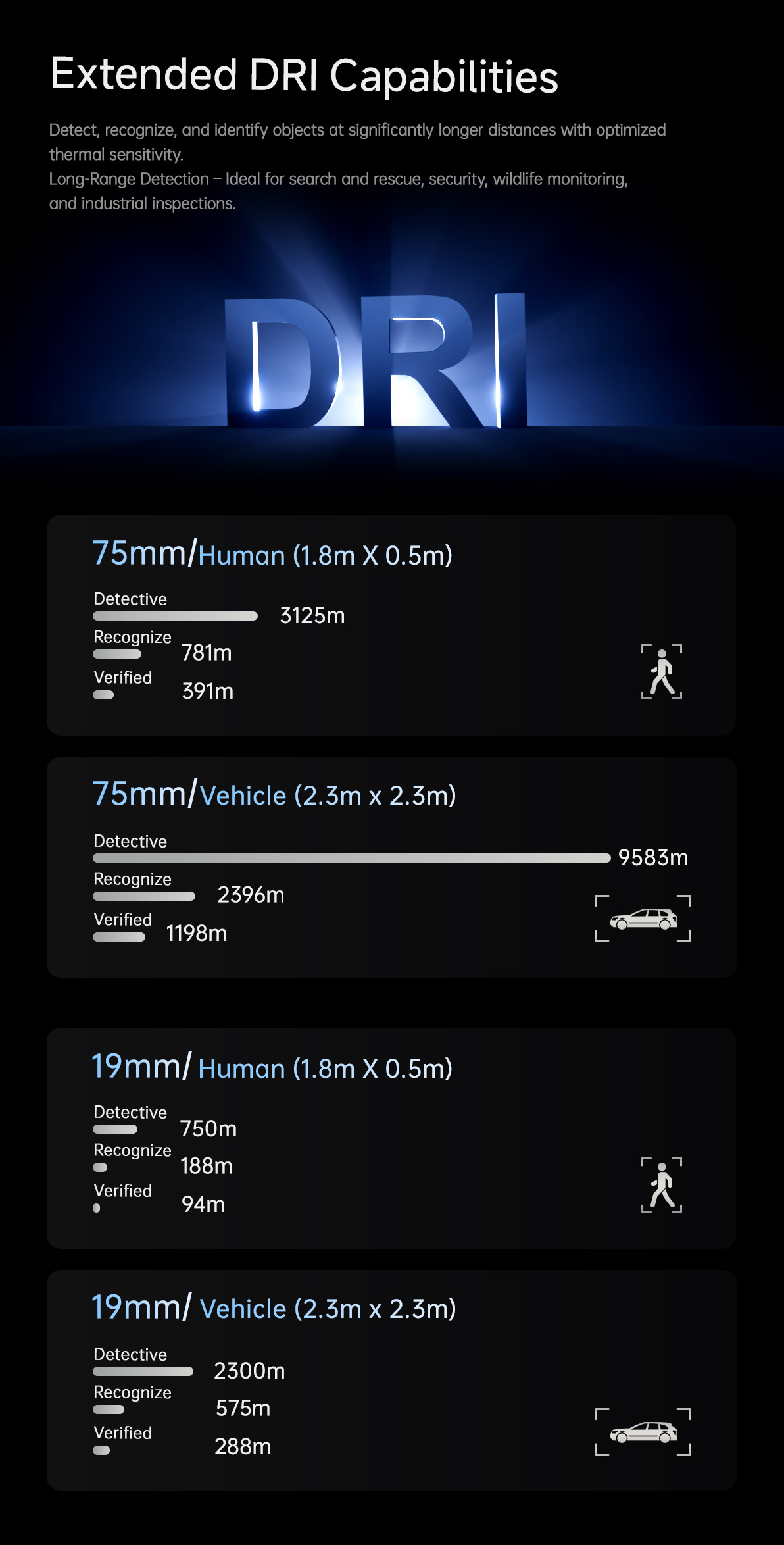
| Detective Distance (Man: 1.8x0.5m) |
3125 meters |
| Recognize Distance (Man: 1.8x0.5m) |
781 meters |
| Verified Distance (Man: 1.8x0.5m) |
391 meters |
| Detective Distance (Car: 4.2x1.8m) |
9583 meters |
| Recognize Distance (Car: 4.2x1.8m) |
2396 meters |
| Verified Distance (Car: 4.2x1.8m) |
1198 meters |
| Working mode |
Uncooled long wave (8μm~14μm) thermal imager |
| Detector pixel |
640*512 |
| Pixel pitch |
12μm |
| Focusing method |
Athermal prime lens |
| Emissivity correction |
0.01~1 |
| NETD |
≤50mK (@25℃) |
| MRTD |
≤650mK (@characteristic frequency) |
| Image enhancement |
Auto adjust image brightness and contrast ratio |
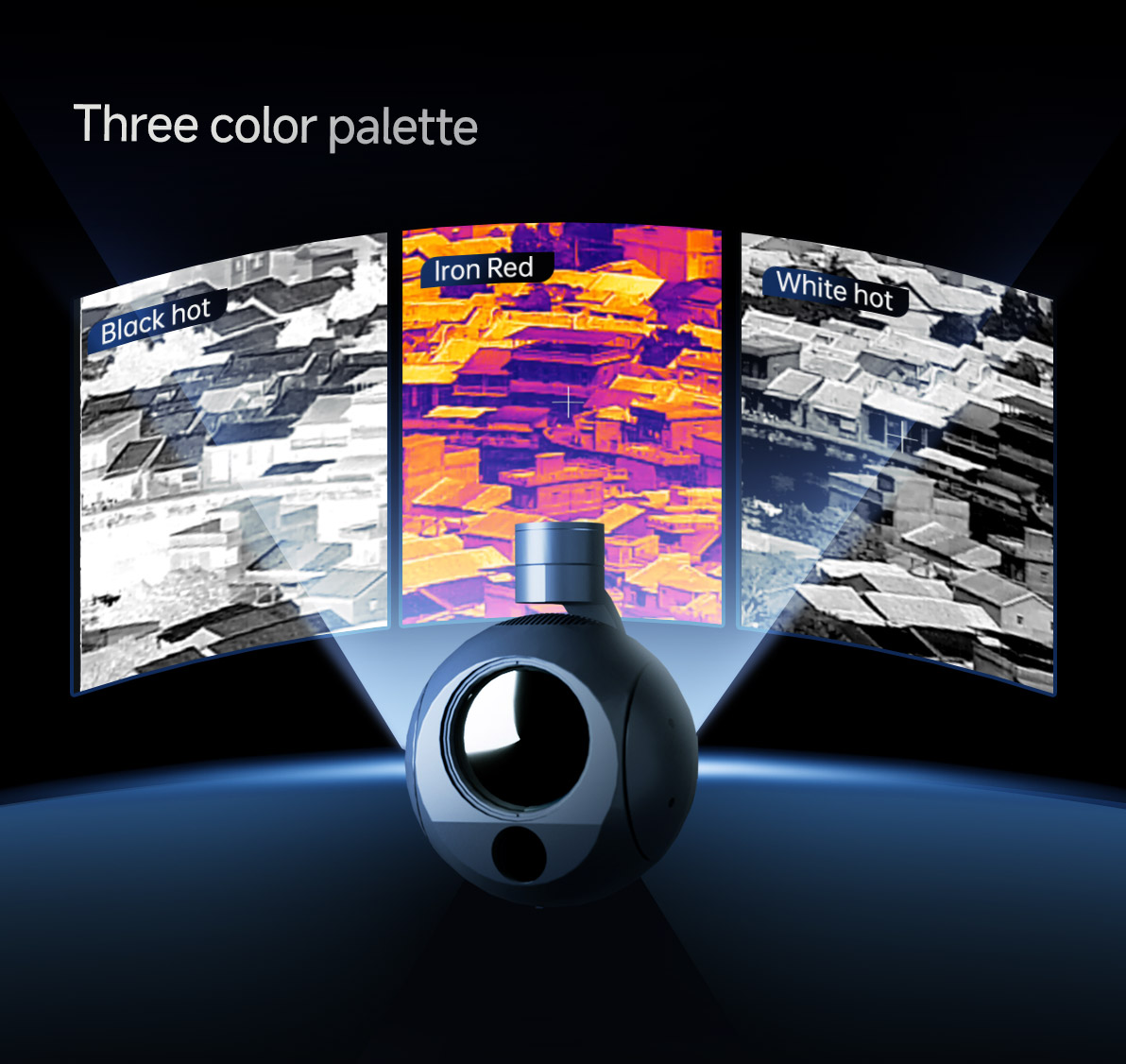
| Color palette |
white hot, black hot, pseudo color |
| Auto Non-uniform correction |
Yes (no shutter) |
| IR Thermal Imager Spec(19mm) |
| Focus Length |
19mm |
| Horizontal FOV |
24.1° |
| Vertical FOV |
19.4° |
| Diagonal FOV |
30.6° |
| Detective Distance (Man: 1.8x0.5m) |
750 meters |
| Recognize Distance (Man: 1.8x0.5m) |
188 meters |
| Verified Distance (Man: 1.8x0.5m) |
94 meters |
| Detective Distance (Car: 4.2x1.8m) |
2300 meters |
| Recognize Distance (Car: 4.2x1.8m) |
575 meters |
| Verified Distance (Car: 4.2x1.8m) |
288 meters |
| Working mode |
Uncooled long wave (8μm~14μm) thermal imager |
| Detector pixel |
640*512 |
| Pixel pitch |
12μm |
| Focusing method |
Athermal prime lens |
| Emissivity correction |
0.01~1 |
| NETD |
≤50mK (@25℃) |
| MRTD |
≤650mK (@characteristic frequency) |
| Image enhancement |
Auto adjust image brightness and contrast ratio |
| Color palette |
white hot, black hot, pseudo color |
| Auto Non-uniform correction |
Yes (no shutter) |
| Digital zoom |
1x / 2x / 3x |
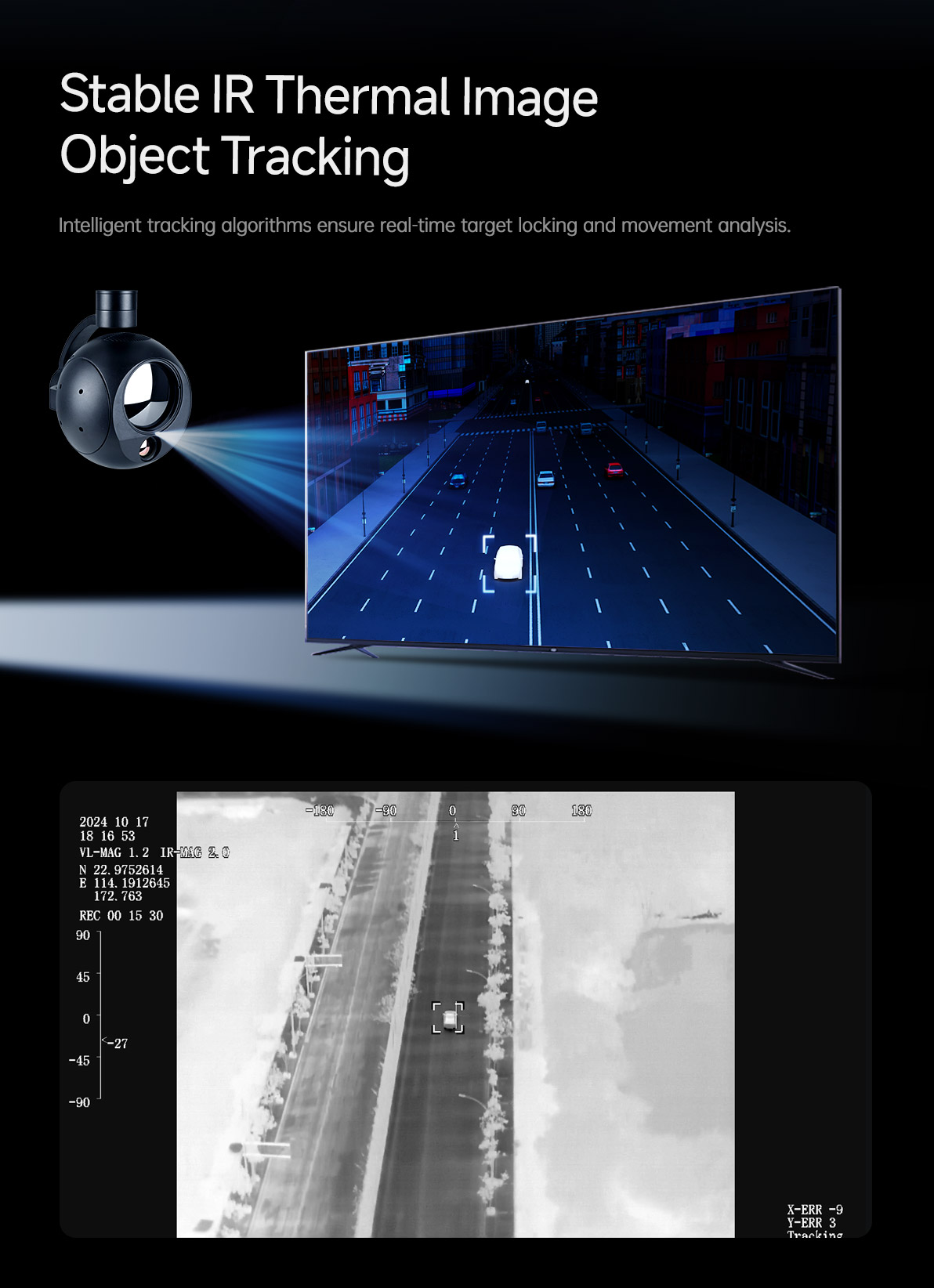
| EO / IR Camera Object Tracking |
| Update rate of deviation pixel |
50Hz |
| Output delay of deviation pixel |
5ms |
| Minimum object contrast |
5% |
| SNR |
4 |
| Minimum object size |
32*32 pixel |
| Maximum object size |
128*128 pixel |
| Tracking speed |
±48 pixel/frame |
| Object memory time |
100 frames (4s) |
| The mean square root values of pulse noise in the object position |
< 0.5 pixel |
| Packing Information |
| N.W. |
1250±10g(Viewport version with Viewport) |
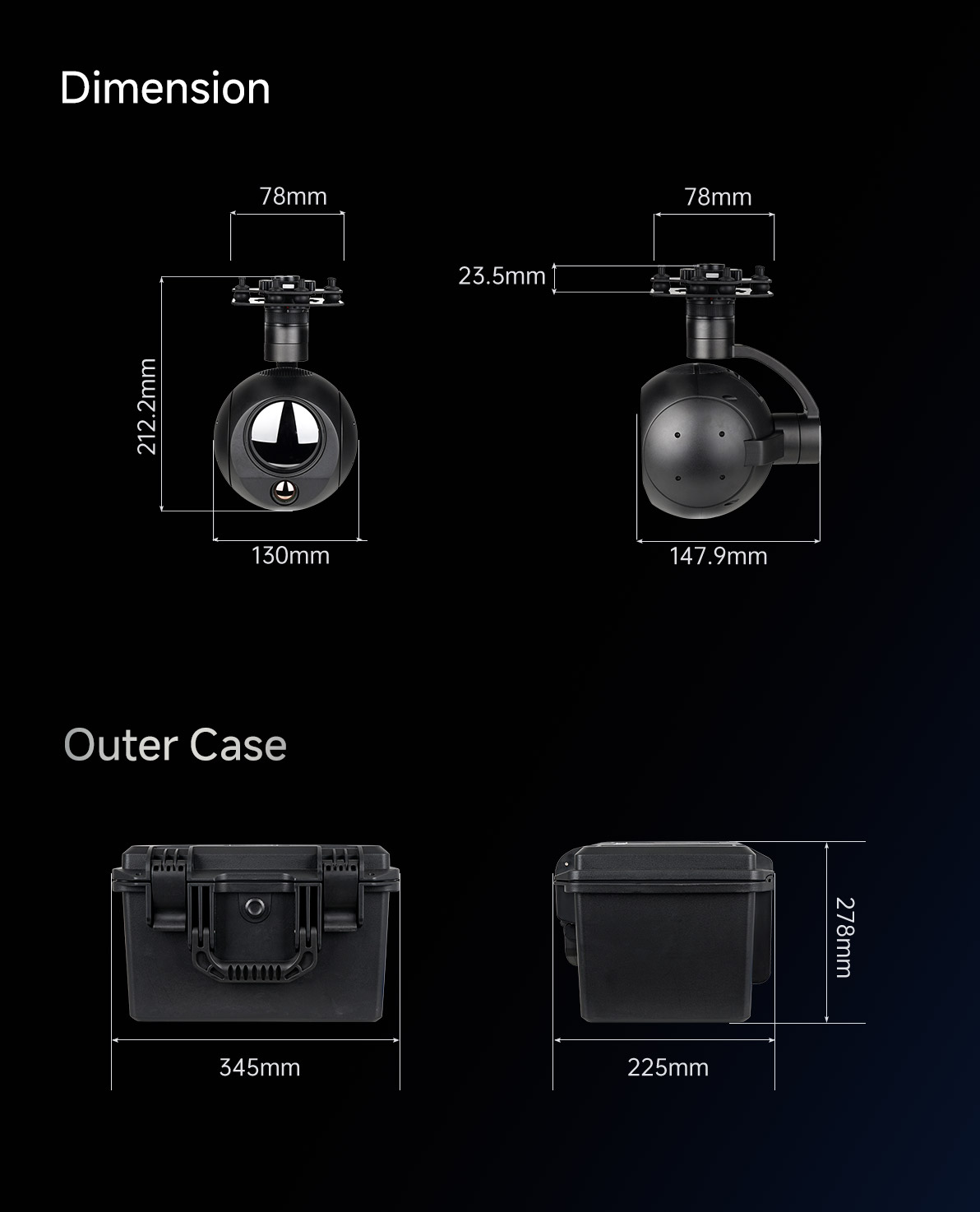
| Product meas. |
147.9*130*203.2mm / 147.9*130*212.2mm(Viewport version with Viewport) |
| Accessories |
1pc gimbal camera device, screws, aluminum cylinders, damping balls,1pc USB to TTL cable / Hight quality plastic box with foam cushion |
| G.W. |
About 2977g |
| Package meas. |
350*300*250mm |