


Q2R/Q2RM




Q2R Sepecification
| Overall Specifications | |
| Working voltage | 12~25.2V |
| Dynamic current | 250~600mA @ 16V |
| Power consumption | Average 4W, Max 9.6W |
| Video Output | Ethernet:IP (RTSP 1080p 25fps H264/H265) |
| Control method | TTL or S.BUS (choose one of them, and TTL by default), and TCP |
| IP Rating | IP4X |
| Working environment temp. | -20℃~+50℃ |
| Product Weight | about 190g |
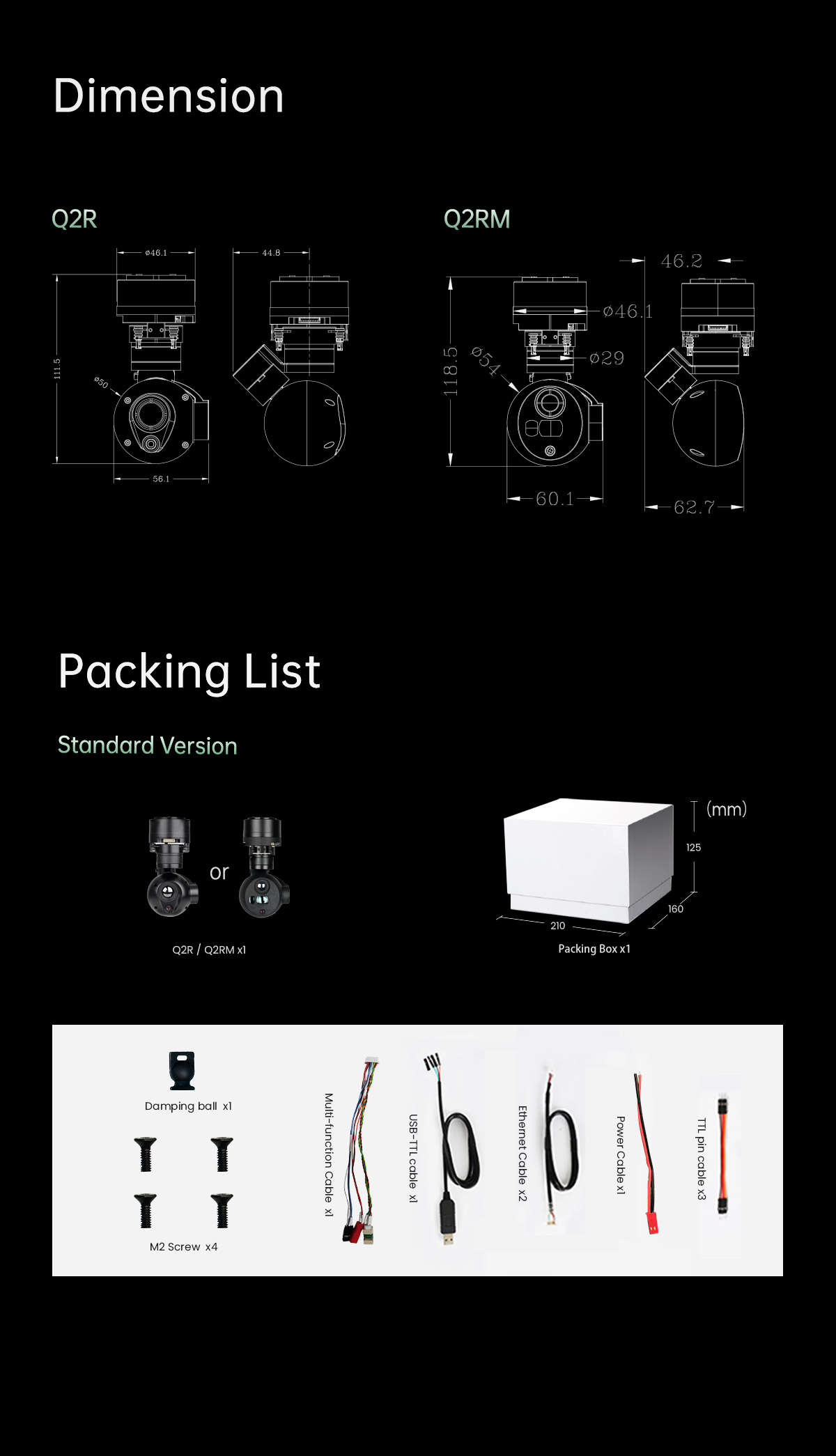
| Product Dimensions | 56.1*50*111.5mm |
| Gimbal Spec | |
| Mechanical Range | Pitch/Tilt: -65°(Up)~135°(Down), Yaw/Pan: ±150° |
| Controllable Range | Pitch/Tilt: -45°~125°, Yaw/Pan: ±145° |
| Vibration angle | Pitch/Yaw: ±0.02° |
| One-key to center | √ |
| EO Camera Spec | |
| Imager Sensor | 1/3" CMOS Sensor |
| Pixel size | 2.9um |
| Resolution | 1920*1080 @30fps |
| Focus Length | 10.36mm |
| Angle of View | 30°*17.1° |
| Digital zoom | 1~3x |
| IR Thermal Imager Spec | |
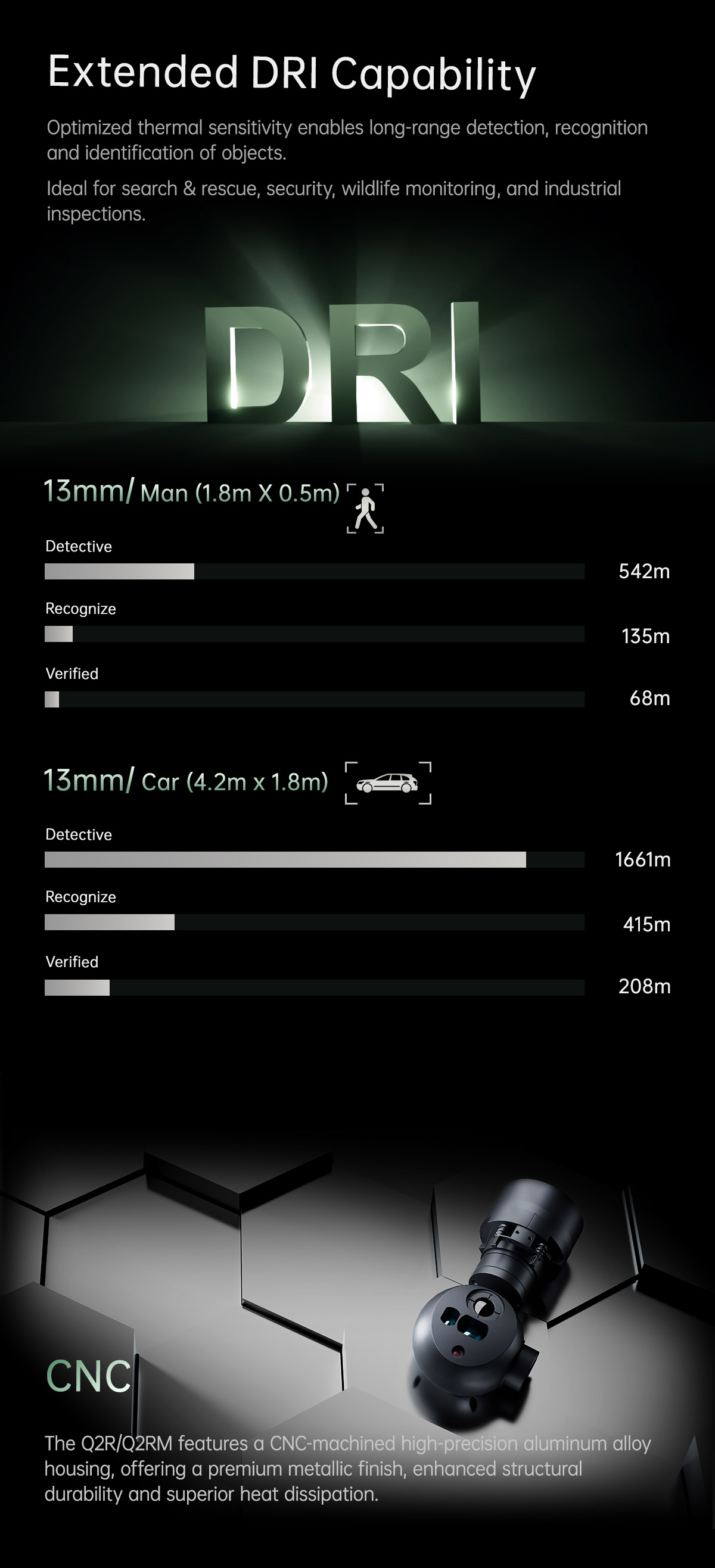
| Focus Length | 13mm |
| Aperture | F1.1 |
| Horizontal FOV | 33.9° |
| Vertical FOV | 27.1° |
| Detective Distance (Man: 1.8x0.5m) | 542 meters |
| Recognize Distance (Man: 1.8x0.5m) | 135 meters |
| Verified Distance (Man: 1.8x0.5m) | 68 meters |
| Detective Distance (Car: 4.2x1.8m) | 1661 meters |
| Recognize Distance (Car: 4.2x1.8m) | 415 meters |
| Verified Distance (Car: 4.2x1.8m) | 208 meters |
| Working mode | Uncooled VOx long wave (8μm~14μm) thermal imager |
| Detector pixel | 640*512 |
| Pixel size | 12μm |
| Focusing method | Athermal prime lens |
| NETD | ≤40mK@F1.0/25℃ |
| Color palette | White hot |
| Camera Object Tracking | |
| Update rate of deviation pixel | 25Hz |
| Minimum object contrast | 5% |
| Minimum object size | 16*16 pixel |
| Maximum object size | 128*128 pixel |
| Tracking speed(Man) | ±32 pixel/frame |
| Tracking speed (Car) | ±48 pixel/frame |
| Object memory time | 100 frames |
Q2RM Specification
| Overall Specifications | |
| Working voltage | 12~25.2V |
| Dynamic current | 400~900mA @ 12V |
| Power consumption | Average 4.8W, Max 10.8W |
| Video Output | Ethernet:IP (RTSP 1080p 25fps H264/H265) |
| Control method | TTL or S.BUS (choose one of them, and TTL by default), and TCP |
| IP Rating | IP4X |
| Working environment temp. | -20℃~+50℃ |
| Product Weight | about 202g |
| Product Dimensions | 62.7*60.1*118.5mm |
| Gimbal Spec | |
| Mechanical Range | Pitch/Tilt: -65°(Up)~130°(Down), Roll: ±30°, Yaw/Pan: ±150° |
| Controllable Range | Pitch/Tilt: -45°~125°, Yaw/Pan: ±130° |
| Vibration angle | Pitch/Roll/Yaw: ±0.02° |
| One-key to center | √ |
| EO Camera Spec | |
| Imager Sensor | 1/3" CMOS Sensor |
| Pixel size | 2.9um |
| Resolution | 1920*1080 @30fps |
| Focus Length | 10.36mm |
| Angle of View | 30°*17.1° |
| Digital zoom | 1~3x |
| IR Thermal Imager Spec | |
| Focus Length | 9.1mm |
| Aperture | F1.0 |
| Horizontal FOV | 48.3° |
| Vertical FOV | 38.6° |
| Diagonal FOV | 62.4° |
| Detective Distance (Man: 1.8x0.5m) | 379 meters |
| Recognize Distance (Man: 1.8x0.5m) | 95 meters |
| Verified Distance (Man: 1.8x0.5m) | 47 meters |
| Detective Distance (Car: 4.2x1.8m) | 1163 meters |
| Recognize Distance (Car: 4.2x1.8m) | 291 meters |
| Verified Distance (Car: 4.2x1.8m) | 145 meters |
| Working mode | Uncooled VOx long wave (8μm~14μm) thermal imager |
| Detector pixel | 640*512 |
| Pixel size | 12μm |
| Focusing method | Athermal prime lens |
| NETD | ≤40mK@F1.0/25℃ |
| Color palette | White hot |
| Camera Object Tracking | |
| Update rate of deviation pixel | 25Hz |
| Minimum object contrast | 5% |
| Minimum object size | 16*16 pixel |
| Maximum object size | 128*128 pixel |
| Tracking speed(Man) | ±32 pixel/frame |
| Tracking speed (Car) | ±48 pixel/frame |
| Object memory time | 100 frames |
| Laser Rangefinder | |
| Range | 5~1200 meters |
| Accuracy | 1m |
| Light Beam | 905nm pulse laser |
| Divergent Angle | ~6 mrad |
| Laser pulse frequency | 1~4Hz |
| Rangefinder | Measure the distance between the object at the center of screen and the laser rangefinder |